展示全部
激光稳定系统包括:激光指向稳定系统,激光频率稳定系统,激光功率稳定系统等。激光指向稳定系统:激光光束由于其方向性好的优点,常被作为直线基准广泛应用在加工和测量设备中。但由于受环境状态等因素的影响,制约了激光方向稳定精度的进一步提高,限制了激光在超精密加工和测量设备中的进一步应用。因此,需要对激光光束作准直处理。在自动准直系统中,系统根据输入光束光斑的位置,驱动执行机构,自动调整接收装置位置,达到实时跟踪准直的目的。激光频率稳定系统:激光具有良好的单色性和相干性,因此,在精密计量、光通信、光频标、高分辨光谱学等领域得到了广泛的应用。而激光输出受环境条件影响,往往是一个不稳定的、随时间变化的无规则 ...
光束偏转器又称光束扫描器,是一种按一定规律改变光束在空间传播方向的器件。在激光应用中,我们经常需要对激光光束进行偏转控制。光束偏转控制主要分为机械式与非机械式两种方式。衡量光束偏转器件的性能指标,主要有偏转速度、偏转角、角度分辨率、光损耗、适用的光波段范围、损伤阈值等。不同的光束偏转方案在以上性能指标上都有各自的特点,分别适用于不同的应用。昊量光电提供包括电光偏转器,声光偏转器,LCPG液晶光栅偏转器,液晶空间光调制器(SLM),快速反射镜,MEMS扫描镜,VBG布拉格光栅角度放大器等产品。各类光束偏转器件的优势各有不同。例如电光偏转器(EOD),速度非常高,偏转精度极高,但其局限性在于光束入 ...
对激光主动稳频技术而言,首先需要一个客观光学频率参考,然后通过激光频率与参考频率比对来获取鉴频误差信号,再通过反馈电路对激光频率进行校准调整,借由这种实时调整使激光频率锁定在参考频率上面。可以看出在主动稳频技术中心,频率参考对稳频的效果起到十分关键的作用。一般而言参考频率需要具有很高的稳定度、重复性和很窄的宽,同事还要能匹配被稳激光的频率。目前比较常见的主动稳频方式包括:基于原子分子跃迁谱线(譬如铷、铯、钾、碘、乙炔等原子或分子的谱线)的饱和吸收稳频、调制转移光谱稳频、偏振光谱稳频、Zeeman 效应稳频等方法,以及基于FP标准具(法布里珀罗,Fabry Perot腔)Pound—Drever ...
随着高精密测量技术需求的不断提出,能提供更加准确的时间基准的光学频率梳应用越来越广泛。光学频率梳简单来讲就是一种频率和相位被锁定的锁模激光器。这种光频梳激光器在频率域内具有严格相等的频率间隔,类似梳子的齿牙,所以被形象的称为光学频率梳(Optical frequency comb),简称光频梳或光梳。在频率域光频梳就类似一把尺子,其最小刻度等于锁模激光的重复频率。尺子起点与零频之间有一定的差值f0 。这个差值由激光脉冲的载波和包络之间的相对相位来决定。光学频率梳主要分两大类:一种是基于锁模激光器实现的光学频率梳,另一种是基于微谐振腔和半导体激光器技术等实现的小型化和芯片级光学频率梳。昊量光电提 ...
目前绝大多数超快激光器均采用激光锁模技术。激光锁模技术自1964年出现后经历了一个迅速的发展过程,目前飞秒、皮秒激光器在国防、科研、工业等各个领域已经开始广泛应用。在科研领域,超强(太瓦、拍瓦)激光器、啁啾脉冲放大(CPA)、超连续谱激光产生、双光子/多光子、飞秒脉冲整形、超短脉冲激光载波包络相位控制、超快激光噪声抑制、超快激光脉冲放大、飞秒光频梳、超快光谱学、超快微纳加工等方向都是目前研究热点。昊量光电为超快激光领域提供各种关键部件及测量设备,脉冲展宽及压缩用啁啾光栅、PPLN晶体、大尺寸LBO、脉冲整形用空间光调制器、飞秒传输用空心光子晶体光纤、再生放大系统、皮秒/飞秒种子源、超快激光放大 ...
中红外线波段(Middle Infra-red, MIR)是波长2.5~25 μm的电磁波。中红外光谱是物质在中红外区的吸收光谱。中红外吸收光谱具有高度的特征性,每种有机化合物具有特征性的中红外吸收光谱,因此适合鉴定有机物、高聚物及其他复杂结构的化合物。产生中红外照射并记录其吸收光谱的仪器成为中红外光谱仪。根据分光原理不同,中红外光谱仪分为色散型和干涉型两大类。目前广泛使用的是傅里叶变换中红外光谱仪(FTIR)。FTIR中红外光谱仪的特点是测量速度快,分辨率高,信照比好,波数准确度及重复性好,测量范围宽等。中红外光谱仪可广泛应用于生物医药、材料科学、石油化工、食品安全、环境保护、气体检测等生产 ...
目前近红外光谱已经成为工农业生产过程质量监控领域中不可或缺的重要分析手段之一,其优势包括测试方便、仪器成本低、体积小、适合在线测量、分析速度快、分析效率高。但近红外光谱分析技术也存在一些局限性,例如过于依赖校正模型、对近红外光谱仪产品的长期稳定性敏感(可能会导致模型失效)、模型转移对近红外光谱仪台间差非常敏感、不适用与痕量检测等。基于上述优缺点,近红外光谱分析技术比较适合对天然复杂体系样本的快速、无损、现场检测,对高度频繁重复测量的快速分析检测、对大型工业装置的最先实时过程分析等场合。主要应用领域包含石油、炼油、化工、制药、农产品、食品检测等。昊量光电为近红外检测领域提供提供各种微型近红外光谱 ...
太赫兹波波(Terahertz,THz)是指频在率0.1Hz到10THz之间的电磁波。太赫兹科学作为一门跨学科的新型交叉科学,衔接了宏观经典电磁波理论。太赫兹波由于其比微波高一到四个数量级的宽带特性和比光波高的能量转换效率,在超高速空间通信、超高分辨率武器制导、医学影像、物质太赫兹光谱特性分析、安全检查、材料检测等领域广泛应用。昊量光电目前拥有较为完整太赫兹产品线,包括各种太赫兹光学元件(反射镜、透镜、偏振片、波片),太赫兹时域光谱仪、太赫兹相机、太赫兹源、太赫兹探测器、太赫兹功率计。同时我们还提供各种用于产生和探测太赫兹波的飞秒激光器、差频半导体激光器、THz晶体、THz天线、THz探针等。 ...
随着无人机技术的日渐成熟,无人机遥感以其高性价比、体积小、灵活机动性高、全天时、实时化等优势,在农业、林业、生态环境、自然灾害监测、电力巡检、矿产资源勘探、测绘等领域发挥着越来越重要作用,成为继卫星遥感和有人航空遥感技术之后的新兴发展热点。昊量光电在无人机遥感方面提供各种各种产品,包括各种类型旋翼无人机、固定翼无人机、无人机载多光谱相机/高光谱相机、高清相机、无人机载激光雷达及无人机载热红外成像仪等。 ...
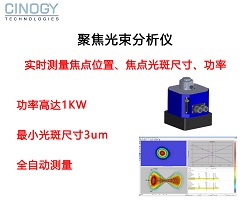
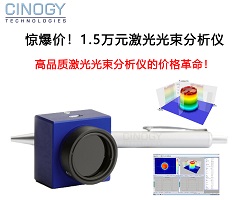
昊量光电提供各种激光加工部件与系统,包括连续波激光器,纳秒激光器,亚纳秒激光器,皮秒激光器,飞秒激光器等激光加工用高功率激光器;平场聚焦镜(场镜),扩束镜,光束整形镜,电动可变焦扩束镜,电动功率可变衰减器;激光加工用空间光调制器,DMD数字微镜及多光束动态激光整形系统;以及常用的工业激光量测工具,功率计,能量计,光束分析仪,M2光束质量分析仪,位置敏感探测器等。 ...
或 投递简历至: hr@auniontech.com